Сервоприводной портальный манипулятор
Когда слышишь ?сервоприводной портальный манипулятор?, первое, что приходит в голову многим — это просто большой, точный кран на рельсах. Но на практике разница между ?просто порталом? и тем, что действительно работает в линии, колоссальная. Основная ошибка — считать, что главное это грузоподъёмность и скорость. На деле, ключевое — это интеграция в технологический процесс, повторяемость позиционирования в условиях вибраций, пыли и цикличных нагрузок, и, что часто упускают, синхронизация работы сервоприводов всех осей. Многие поставщики грешат тем, что предлагают ?стандартное? решение, а потом выясняется, что под нагрузкой конструкция ?играет?, и точность падает в разы. У нас на объектах такое было не раз.
От концепции до железа: где кроются подводные камни
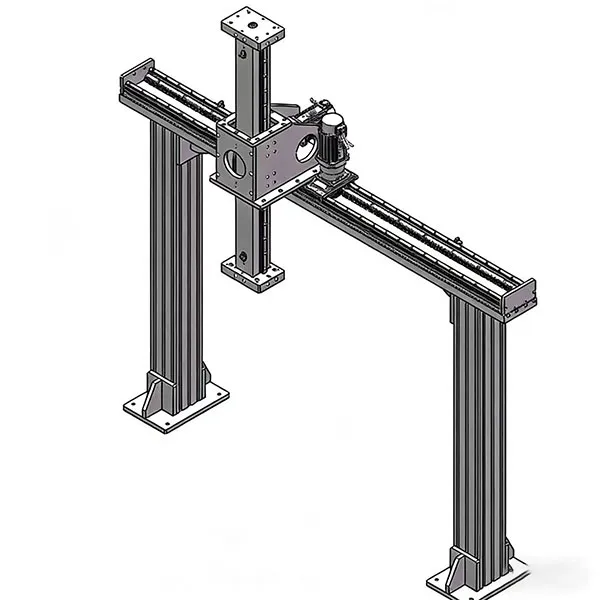
Конструкция портала кажется простой: две стойки, балка, каретка. Но вот эта самая балка — её жёсткость на кручение при неравномерной нагрузке (а она почти всегда неравномерная) это головная боль. Мы как-то ставили манипулятор для перекладки литых роторов из кокиля на конвейер. Заказчик сэкономил, взял балку с открытым профилем, посчитав, что сечения хватит. В итоге при движении с грузом в крайних положениях возникал крен в несколько миллиметров, которого хватило, чтобы захват периодически промахивался. Пришлось усиливать, ставить дополнительные растяжки, что убило эстетику, но спасло проект.
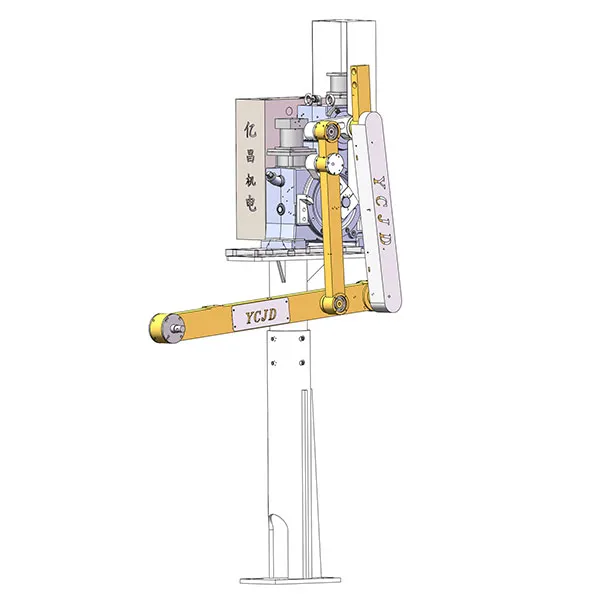
Сервоприводы — отдельная тема. Нельзя просто взять три мотора и поставить на каждую ось. Речь идёт о полной синхронизации, особенно по оси Y (поперечное движение балки). Если приводы на двух стойках работают не в идеальном тандеме, возникает перекос, ведущий к ускоренному износу рельсов и шестерён. Мы в своей практике отдаём предпочтение решениям с центральным контроллером, управляющим осями как единым кинематическим контуром. Китайские коллеги, например, ООО Тайчжоу Ичан Электромеханическое Оборудование (сайт: https://www.tzycjd.ru), в своих комплексах для производства электродвигателей как раз делают упор на эту синхронность. У них сервоприводной портальный манипулятор часто идёт как часть линии, например, для переноса статоров между сварочным постом и прессом, где точность установки критична.
Ещё один нюанс — система обратной связи. Энкодеры на моторах — это хорошо, но в высокоточных задачах, таких как установка ротора в пресс-форму, часто требуется дополнительная внешняя система позиционирования, например, лазерная. Это страхует от накопления ошибки. Но и это усложняет настройку. Помню случай, когда из-за вибрации от соседнего гидравлического пресса сбивался счётчик импульсов энкодера. Ловили проблему два дня, пока не поставили виброзащиту на кабель.
Программирование и адаптация: ?мозги? манипулятора
Здесь уже начинается область, где дешёвое решение почти всегда проигрывает. Простой teach-in (обучение точкам) для повторяющихся операций — это одно. Но когда нужна адаптация под разные типоразмеры изделий или работа с нежёстко закреплённой заготовкой, нужна более сложная логика. Например, наш манипулятор на линии сборки должен был брать статор с конвейера, положение которого могло ?плавать? на пару сантиметров. Пришлось внедрять систему машинного зрения для коррекции точки захвата. Без этого автоматизация линии была бы невозможна.
Интерфейс оператора — тоже важный момент. Он должен быть интуитивным для технолога, а не только для инженера-наладчика. Кнопки ?Домой?, ?Автоцикл?, ?Ручное перемещение? должны быть на главном экране. А все тонкие настройки — в защищённом паролем меню. У некоторых европейских производителей с этим порядок, но и у некоторых российских интеграторов, и у той же ООО Тайчжоу Ичан в их решениях виден практический подход: интерфейсы делаются под конкретную задачу — сварка, прессовка, испытания — без лишних абстрактных функций.
Часто забывают про диагностику. Хороший контроллер должен вести журнал ошибок, показывать нагрузку на приводы, температуру, считать моточасы. Это не прихоть, а необходимость для превентивного обслуживания. Когда видишь в логе растущее время позиционирования по одной из осей, можно запланировать проверку рельсов и шестерён до того, как случится аварийный останов всей линии.
Интеграция в линию: больше, чем механика
Это, пожалуй, самый критичный этап. Сервоприводной портальный манипулятор редко работает сам по себе. Он — звено в цепи. Значит, нужны интерфейсы с предыдущим и последующим оборудованием: конвейерами, прессами, сварочными станциями. Чаще всего это цифровые I/O (дискретные входы/выходы) и промышленная сеть, например, Profinet или EtherCAT. Проблемы начинаются, когда протоколы не совпадают. Приходится ставить шлюзы, что добавляет точек отказа.
Безопасность. Когда вокруг движется портал с грузом в тонну, ограждения, световые завесы, аварийные стопы — это must-have. Но и тут есть нюансы. Например, зона безопасности должна рассчитываться с запасом на инерцию. Видел ситуацию, где манипулятор по аварийному стопу выезжал за пределы световой завесы, что создавало опасность для обслуживающего персонала. Пришлось перепрограммировать контроллер безопасности на более жёсткое торможение.
Энергопотребление и эргономика. Серводвигатели — не самые прожорливые, но при постоянной работе в режиме старт-стоп пиковые нагрузки на сеть могут быть высоки. Нужен правильный расчёт и, возможно, установка активного выпрямителя для рекуперации энергии. Что касается эргономики, то точки техобслуживания — смазки, датчики — должны быть в свободном доступе. Нередко конструкторы об этом забывают, и потом для замены щёток на сервомоторе приходится разбирать пол-портала.
Практические кейсы и почему ?универсальное? — плохо
Приведу пример из опыта. Нужно было автоматизировать участок упаковки готовых электродвигателей. Грузы разные, точки взятия и установки — разные. Заказчик хотел ?универсальный? портальный манипулятор. Мы предложили кастомное решение с изменяемой геометрией захвата и программируемыми траекториями для 5 типов изделий. Ключевым было использование оборудования, изначально заточенного под такие задачи. Мы рассматривали в том числе варианты от ООО Тайчжоу Ичан Электромеханическое Оборудование, так как их профиль — комплексные решения для производства электродвигателей, а их сервоприводной портальный манипулятор позиционируется как часть экосистемы, что упрощает интеграцию. В итоге сделали на базе их компонентов, но с нашей системой управления.
Другой случай — неудачный. Попытка использовать мощный портальный манипулятор для деликатной операции установки щёток в коллекторные двигатели. Механика была избыточной, ?жёсткой?, и несмотря на все настройки сервоприводов, микро-вибрации от приводов передавались на захват. В итоге процент брака был выше, чем при ручной установке. Вывод: для сверхточных операций нужна специализированная, часто более лёгкая и жёсткая конструкция, а не адаптация тяжёлого портала.
Сейчас тренд — в связке манипулятора с системами ИИ для самодиагностики и оптимизации траекторий. Но в реальности на большинстве производств востребована простая, надёжная и ремонтопригодная конструкция. Как раз такая, которую предлагают компании, плотно работающие с индустрией, как упомянутая ООО Тайчжоу Ичан, где оборудование разрабатывается, исходя из конкретных сценариев в литье, сварке и сборке электродвигателей.
Вместо заключения: на что смотреть при выборе
Итак, если резюмировать разрозненные мысли. При оценке сервоприводного портального манипулятора не зацикливайтесь на паспортных данных. Спросите у поставщика: как обеспечивается жёсткость балки при несимметричной нагрузке? Как синхронизированы приводы по оси Y? Какая система обратной связи используется и как она защищена от помех? Есть ли в контроллере встроенные функции для компенсации люфтов и температурных расширений?
Обязательно запросите видео работы аналогичного оборудования в цикле, желательно под нагрузкой. Обратите внимание на плавность хода и отсутствие рывков в крайних точках. Поинтересуйтесь, как решены вопросы безопасности и техобслуживания.
И главное — рассматривайте манипулятор не как отдельную единицу, а как узел в вашей технологической линии. Его способность к бесшовной интеграции через стандартные промышленные интерфейсы часто важнее, чем прибавка в скорости на 10%. Именно комплексный подход, как у производителей, специализирующихся на отраслевых решениях, в долгосрочной перспективе экономит время, нервы и деньги, избавляя от бесконечных доработок и согласований ?железа? от одного вендора и ?софта? от другого.
Соответствующая продукция
Соответствующая продукция



Самые продаваемые продукты
Самые продаваемые продукты-
 Многопозиционная автоматическая роторная машина для литья алюминия открытого типа
Многопозиционная автоматическая роторная машина для литья алюминия открытого типа -
 Четырехстоечный пресс
Четырехстоечный пресс -
 Плавильная печь
Плавильная печь -
 Однопозиционная зажимная машина для статора и ротора с косым пазом
Однопозиционная зажимная машина для статора и ротора с косым пазом -
 Однопозиционная лазерная сварочная машина для статора и ротора
Однопозиционная лазерная сварочная машина для статора и ротора -
 Гидравлическая машина для горячей штамповки вала
Гидравлическая машина для горячей штамповки вала -
 Испытательный стенд для роторов
Испытательный стенд для роторов -
 Машина для измерения высоты для статора и ротора
Машина для измерения высоты для статора и ротора -
 Сервоприводная разливочная машина
Сервоприводная разливочная машина -
 Сервоприводной портальный манипулятор
Сервоприводной портальный манипулятор -
 Статорная зажимная машина
Статорная зажимная машина -
 Промышленный масляный охладитель
Промышленный масляный охладитель
Связанный поиск
Связанный поиск- Многопозиционная сварочная машина для статора и ротора
- Многопозиционная аргоновая сварочная машина для статора и ротора
- Высокоэффективная электромеханическая напольная машина для измерения высоты
- Высокоточная электромеханическая напольная машина для измерения высоты для ротора
- Энергосберегающая плавильная печь
- Однопозиционная энергосберегающая роторная машина для литья алюминия
- Ремонт пресс форм
- Четырёхстоечная многопозиционная прецизионная роторная машина для литья алюминия
- Лёгкий конвейер
- Конвейер



