Сервоприводной тяжёлый портальный манипулятор
Когда слышишь ?сервоприводной тяжёлый портальный манипулятор?, многие сразу представляют просто усиленный мостовой кран. Это в корне неверно. Разница — в слове ?сервоприводной?. Это не про поднять-переместить-опустить, это про точность в микрометрах при нагрузке в тонны. В моей практике было несколько проектов, где эту разницу либо недооценивали, либо переоценивали, что в итоге выливалось в переделку всей логики управления.
Где кроется настоящая сложность?
Основная загвоздка — не в механике. Конструкция портала, стальные балки, рельсовые пути — это, конечно, важно для жёсткости и долговечности, но это решаемо. Проблема в синхронизации. Когда у тебя два (а иногда и больше) сервопривода на одной поперечной балке, работающих с грузом в 5-10 тонн, любая рассинхронизация в доли миллиметра создаёт чудовищные паразитные нагрузки. Видел, как на одном из старых объектов из-за этого буквально ?вело? всю конструкцию, рельсы изнашивались за полгода.
Именно поэтому многие пытаются сэкономить на системе управления, ставя обычные частотные преобразователи с обратной связью по энкодеру. Работает? Да. Но о точном позиционировании, особенно при динамичных перемещениях с переменной массой (например, когда манипулятор забирает отлитую заготовку из формы), речи не идёт. Получается дорогая тележка, а не манипулятор.
Здесь как раз и важна комплексность подхода. Нужно рассматривать систему целиком: привод, редуктор (часто планетарный), датчики обратной связи (абсолютные энкодеры — must have), и, конечно, контроллер. Контроллер должен ?понимать? не только положение, но и упругие деформации самой конструкции под нагрузкой. Это уже уровень продвинутых CNC-систем.
Опыт интеграции в реальные линии
Один из наиболее показательных кейсов был связан с автоматизацией участка обработки крупных станин. Задача — брать заготовку весом около 8 тонн с паллета, точно устанавливать на расточной станок, а после обработки — так же точно возвращать. Клиент изначально хотел ?просто мощный портал?. В процессе обсуждения выяснилось, что посадочные места на станине имеют допуск ±0.1 мм, а сама заготовка после черновой обработки имеет температурные деформации.
Пришлось проектировать портальный манипулятор не только с сервоприводами, но и с системой активной компенсации перекоса через датчики усилия на захвате. Фактически, конечный позиционер (захват) имел свою ?плавающую? степень свободы с сервоуправлением. Это добавило сложности и стоимости, но решило проблему. Без этого либо бы деталь заклинивало, либо убивались точные посадочные места на станке.
В таких проектах часто помогает опыт компаний, которые видят картину целиком. Например, ООО Тайчжоу Ичан Электромеханическое Оборудование (их сайт — tzycjd.ru) в своей линейке как раз указывает на сервоприводной портальный манипулятор как на часть комплексных решений для производства электродвигателей. Это ключевой момент: они его позиционируют не как отдельный продукт, а как узел в линии, что подразумевает готовность решать вопросы интеграции и синхронизации с другим оборудованием — прессами, конвейерами, испытательными стендами.
Типичные ошибки при выборе и эксплуатации
Первая и главная — игнорирование условий эксплуатации. Тяжёлый портальный манипулятор часто ставят в цеха, где есть вибрация от кузнечных молотов или других прессов. Заложенная в проект точность в 0.05 мм на бумаге превращается в 0.5 мм на практике, потому что фундамент ?гуляет?. Приходится делать независимый фундамент с виброизоляцией — дорого, но необходимо.
Вторая — экономия на мелочах. Кабельные трассы, например. Для сервоприводов нужны специальные гибкие кабели, выдерживающие миллионы циклов перегиба при перемещении портала. Ставили обычные — через полгода начинаются сбои связи с энкодерами, привод теряет позицию. Ремонт останавливает всю линию.
Третья — недооценка важности ПО и интерфейсов. Современный манипулятор должен легко стыковаться с MES-системой цеха, отдавать данные о наработке, количестве циклов, предупреждать о необходимости ТО. Часто закупается ?железо?, а на софт и интеграцию денег не остаётся. В итоге получается островок автоматизации, требующий ручного контроля.
Про надёжность и ?запас?
В тяжёлом оборудовании запас прочности — это не роскошь, а необходимость. Но важно понимать, где этот запас нужен. Усиливать все балки в два раза — значит получить колоссальную инерцию, с которой не справятся сервоприводы, или придётся ставить ещё более мощные и дорогие. Грамотный расчёт — это поиск баланса. Иногда лучше заложить в привод 30% запаса по моменту, чем на 50% увеличивать вес всей подвижной части. Это вопрос для глубокого инженерного анализа, а не для примерных прикидок.
Будущее: что меняется в подходах?
Сейчас тренд — на ?интеллектуализацию?. Речь не об ИИ, а о встроенных системах самодиагностики и адаптации. Например, манипулятор, который сам может компенсировать износ рельсовых путей или постепенное изменение жёсткости конструкции, внося поправки в управляющие алгоритмы. Это уже не фантастика, некоторые производители закладывают такие возможности.
Другой момент — энергоэффективность. Сервоприводной привод сам по себе эффективнее гидравлики, но в режиме ожидания или при удержании груза тоже потребляет энергию. Появляются системы рекуперации энергии в сеть при опускании груза. Для круглосуточных производств экономия за год становится очень существенной.
И, конечно, модульность. Взять ту же компанию ООО Тайчжоу Ичан. Судя по описанию их деятельности (объединение НИОКР, интеллектуального производства и продаж), они предлагают комплексные решения. Это наводит на мысль, что их сервоприводной портальный манипулятор, скорее всего, проектируется как модуль, который можно относительно безболезненно ?встроить? в уже существующую линию с их же прессами или конвейерами, используя общие протоколы связи и управления. Это сильно сокращает время и риски интеграции.
Вместо заключения: практический совет
Если рассматриваете внедрение сервоприводного тяжёлого портального манипулятора, начинайте не с запроса коммерческих предложений на оборудование. Начните с глубокого технического задания, где будет чётко прописана не только грузоподъёмность и точность, но и все сопутствующие процессы: как будет подаваться заготовка, какие будут температуры в зоне работы, как часто будут меняются оснастки (захваты), кто и как будет проводить обслуживание. Без этого любое, даже самое технологичное оборудование, рискует стать очень дорогой игрушкой.
И всегда запрашивайте у поставщика не просто паспортные данные, а отчёт о динамических испытаниях манипулятора под нагрузкой, близкой к вашей. Цифры статической точности — это одно. А как ведёт себя система, когда нужно разогнать тонную массу, точно остановить её и через секунду начать движение в другую сторону — это совсем другое. Только такие данные дают реальное понимание возможностей оборудования.
В общем, тема эта глубокая. Каждый новый проект — это новый набор уникальных challenges. И именно в их решении и кроется разница между просто машиной и по-настоящему работоспособным технологическим звеном.
Соответствующая продукция
Соответствующая продукция


Самые продаваемые продукты
Самые продаваемые продукты-
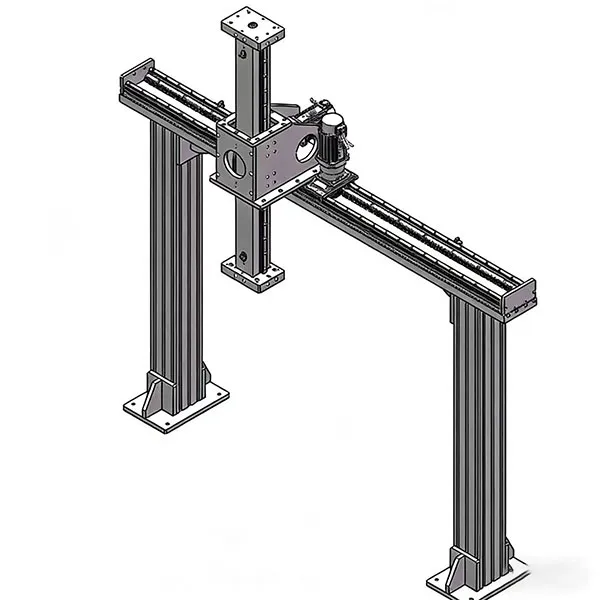 Сервоприводной портальный манипулятор
Сервоприводной портальный манипулятор -
 Испытательный стенд для роторов
Испытательный стенд для роторов -
 Статорная зажимная машина
Статорная зажимная машина -
 Пресс-форма для статора и ротора
Пресс-форма для статора и ротора -
 Однопозиционная лазерная сварочная машина для статора и ротора
Однопозиционная лазерная сварочная машина для статора и ротора -
 Многопозиционная автоматическая роторная машина для литья алюминия открытого типа
Многопозиционная автоматическая роторная машина для литья алюминия открытого типа -
 Четырехстоечный пресс
Четырехстоечный пресс -
 Автоматическая фаскоснимательная машина для статора и ротора
Автоматическая фаскоснимательная машина для статора и ротора -
 Многопозиционная роторная автоматическая машина для литья алюминия “два в одном”
Многопозиционная роторная автоматическая машина для литья алюминия “два в одном” -
 Гидравлическая машина для горячей штамповки вала
Гидравлическая машина для горячей штамповки вала -
 Однопозиционная зажимная машина для статора и ротора с косым пазом
Однопозиционная зажимная машина для статора и ротора с косым пазом -
 Плавильная печь
Плавильная печь
Связанный поиск
Связанный поиск- Многопозиционная крупная роторная машина для литья алюминия
- Прессовые монтажные машины для статоров и роторов
- Разливочная машина
- Многопозиционная статорная зажимная машина
- Полностью автоматическая лазерная сварочная машина для статора и ротора
- Полуавтоматическая роторная машина для литья алюминия
- Высокоточная пресс-форма для статора и ротора для высокоскоростной штамповки
- Прецизионная фаскоснимательная машина для статоров
- Конвейер для промышленных производственных линий
- Электромеханическая напольная машина для измерения высоты



