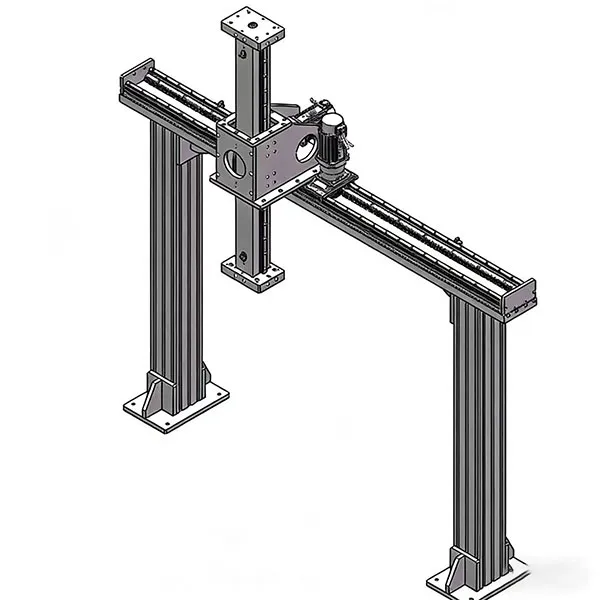
Сервоприводной лёгкий портальный манипулятор
Когда говорят ?сервоприводной лёгкий портальный манипулятор?, многие сразу представляют себе просто компактный кран на рельсах. Но это поверхностно. Суть в том, что ?лёгкий? здесь — не про грузоподъёмность в первую очередь, а про концепцию: мобильность, скорость и точность позиционирования за счёт сервоприводов, а не грубая сила. Частая ошибка — пытаться заменить им полноценный мостовой кран для тяжёлых заготовок. Не выйдет. Его ниша — операции с умеренным весом, но где важны повторяемость и чистота ?воздуха? (читай — минимум смазки и пыли от цепных передач).
Конструктивные нюансы, которые не пишут в каталогах
Взять, к примеру, направляющие. Многие производители экономят, ставя обычные роликовые тележки по швеллеру. Для медленных перемещений сойдёт. Но как только речь заходит о точном позиционировании сервоприводом на скорости, начинаются проблемы: люфт, вибрация, износ. Мы в своё время на одном проекте столкнулись с этим — манипулятор ?не находил? точку с погрешностью меньше 1.5 мм, хотя по паспорту должен был укладываться в 0.1 мм. Пришлось переделывать, ставить прецизионные рельсовые направляющие с отдельным фундаментом. Дороже, но иначе смысл сервопривода теряется.
Ещё момент — жёсткость портала. ?Лёгкий? не должен означать ?трясущийся?. При разгоне и торможении, особенно с грузом на вылете, вся конструкция испытывает знакопеременные нагрузки. Если балка слабая, возникают колебания, которые сервосистема пытается парировать, перегружаясь. Видел образцы, где для снижения веса использовали алюминиевые профили без внутренних рёбер жёсткости — на испытаниях при движении с полной нагрузкой была заметная ?игра?. В итоге для ответственных участков сборки такой вариант не подошёл.
И конечно, сервопривод. Тут важно не просто поставить мотор с энкодером, а правильно выбрать момент и инерционность, согласовать с редуктором (если он есть). Часто встречается перестраховка — ставят двигатель с большим запасом по мощности. Это ведёт не только к удорожанию, но и к излишней инерционности системы: точность позиционирования может даже ухудшиться из-за сложностей с точной остановкой. Лучше точный расчёт под конкретную задачу: вес груза, дистанции, требуемое время цикла.
Сценарии применения: где он реально выигрывает
Один из самых удачных случаев внедрения, который я наблюдал — это участок финальной сборки небольших электродвигателей. Там нужно было аккуратно, без ударов, устанавливать ротор в статор, да ещё и с контролем соосности. Ручная операция была медленной, а использование обычной тали — неточным. Сервоприводной лёгкий портальный манипулятор с захватом, оснащённым датчиком усилия, позволил автоматизировать процесс. Программа вела деталь, компенсируя небольшие перекосы, и мягко дожимала до нужного положения. Производительность выросла, брак по царапинам и перекосу упал почти до нуля.
Другой пример — работа в паре с испытательными стендами. Например, после пропитки статоров нужно переместить их в камеру сушки, а потом — на стенд высоковольтных испытаний. Раньше это делали на тележках вручную. Манипулятор, запрограммированный на несколько точек, стал выполнять эту логистику сам, по сигналу от предыдущего этапа. Ключевое здесь — чистота и отсутствие вибраций при переносе, чтобы не стряхнуть ещё не затвердевший лак.
Интересный, но неочевидный сценарий — загрузка заготовок в станки ЧПУ в условиях мелкосерийного производства. Где детали разные, и жёсткую автоматизацию с роботом-манипулятором не оправдать. Лёгкий портал, оснащённый системой технического зрения или даже с ручным наведением в режиме ?обучения?, становится гибким инструментом. Оператор один раз показывает траекторию для новой детали — и дальше манипулятор работает сам. Это как раз та золотая середина между полной ручной работой и дорогой роботизацией.
Ошибки интеграции и ?подводные камни?
Самая распространённая ошибка — недооценка подготовки инфраструктуры. Портальный манипулятор — не станок, который поставил на пол и подключил. Нужен ровный, жёсткий пол или отдельный фундамент под рельсовые пути. Перепады даже в пару миллиметров на длине в несколько метров приведут к перекосу портала, повышенному износу и ошибкам позиционирования. У нас был проект, где пришлось делать полноценную бетонную стяжку с последующей шлифовкой, хотя заказчик initially считал, что хватит и существующего цехового пола.
Вторая проблема — электрика и сети. Сервоприводы чувствительны к качеству питания и помехам. Если рядом работают мощные инверторы от сварочных аппаратов или прессов, могут быть сбои. Обязательно нужен отдельный щит с фильтрами, а иногда и стабилизатор. Также не стоит забывать про кабелеукладчик. Гибкий кабель, волочащийся по полу, — это история на пару месяцев, потом перетрутся жилы. Нужна либо кабельная тележка, либо система безпроводного питания и передачи данных для тележки, что, конечно, дороже.
И третье — программная часть. Не все готовы, что для такого оборудования нужен не только оператор, но и хотя бы технолог-программист, который сможет прописать новые траектории или адаптировать старые под изменение техпроцесса. ?Купил, привёз, заработало? — так не бывает. Требуется настройка и иногда доработка ПО под конкретные задачи цеха. Это нужно закладывать в бюджет и сроки внедрения с самого начала.
Рынок и выбор поставщика: на что смотреть
Сейчас на рынке много предложений, от европейских premium-брендов до более доступных азиатских. Выбор зависит от задачи и бюджета. Если речь идёт о высокоточном производстве электронных компонентов или фармацевтики, возможно, есть смысл смотреть на немецкие или японские решения. Но для многих машиностроительных и электромоторных задач, где важна адекватная цена и достаточная надёжность, интересны компании, которые специализируются именно на оборудовании для этой отрасли.
Здесь, кстати, можно упомянуть ООО Тайчжоу Ичан Электромеханическое Оборудование (сайт: https://www.tzycjd.ru). Компания, основанная в 2014 году, фокусируется на комплексных решениях для производства электродвигателей. В их линейке, среди прочего, есть и сервоприводной портальный манипулятор. Что ценно в таком узкоспециализированном поставщике — они понимают контекст. Их оборудование, как правило, заточено под типовые операции в электромоторостроении: работа со статорами, роторами, перемещение в зоны пропитки и испытаний. Это значит, что базовое ПО уже будет содержать типовые программы для этих операций, а конструкция учтёт специфику (например, стойкость к парам лака). Конечно, это не отменяет необходимости тщательных испытаний и адаптации, но стартовая точка получается ближе к финишу.
При выборе любого поставщика, включая упомянутого, нужно требовать не просто каталог, а техзадание на основе вашего ТЗ. Обязательно съездить посмотреть работающие образцы, желательно на производстве, похожем на ваше. Спросить о реальной точности позиционирования не на стенде, а после полугода работы в цеху. Уточнить, как организована техподдержка, есть ли инженеры для пусконаладки, как быстро поставляются запчасти. Эти ?бытовые? вопросы в итоге важнее паспортных цифр.
Взгляд вперёд: куда движется технология
Сейчас тренд — это интеграция. Лёгкий портальный манипулятор перестаёт быть изолированной единицей. Он становится элементом цифровой экосистемы цеха. Важны возможности по интеграции в MES-систему (отправка данных о выполненных операциях, простоях), подключение датчиков IoT для предиктивного обслуживания (мониторинг вибрации подшипников, температуры сервоприводов).
Ещё одно направление — развитие кинематических схем. Появляются решения с дополнительными степенями свободы на самой каретке, например, поворотным устройством или наклонной осью. Это превращает портал уже в более универсального робота, способного выполнять сложные траектории, например, при сборке или нанесении герметика.
И, конечно, упрощение программирования. Будущее за более интуитивными интерфейсами — обучение движением ?взять-за-руку?, 3D-симуляция траекторий прямо на планшете, голосовые команды для простых операций. Цель — снизить порог входа для технологов и сделать переналадку между разными продуктами делом минут, а не часов. Пока это всё ещё в зачаточном состоянии для большинства промышленных решений, но движение в эту сторону очевидно. В итоге, сервоприводной лёгкий портальный манипулятор — это не просто ?тележка с моторчиком?. Это гибкий, точный инструмент, чей успех на 30% зависит от качества железа и на 70% — от грамотного внедрения и понимания его реальных, а не рекламных, возможностей.
Соответствующая продукция
Соответствующая продукция



Самые продаваемые продукты
Самые продаваемые продукты-
 Однопозиционная лазерная сварочная машина для статора и ротора
Однопозиционная лазерная сварочная машина для статора и ротора -
 Автоматическая фаскоснимательная машина для статора и ротора
Автоматическая фаскоснимательная машина для статора и ротора -
 Многопозиционная лазерная сварочная машина для статора и ротора
Многопозиционная лазерная сварочная машина для статора и ротора -
 Многопозиционная автоматическая роторная машина для литья алюминия открытого типа
Многопозиционная автоматическая роторная машина для литья алюминия открытого типа -
 Конвейер
Конвейер -
 Пресс-форма для статора и ротора
Пресс-форма для статора и ротора -
 Статорная зажимная машина
Статорная зажимная машина -
 Испытательный стенд для роторов
Испытательный стенд для роторов -
 Гидравлическая машина для горячей штамповки вала
Гидравлическая машина для горячей штамповки вала -
 Многопозиционная роторная автоматическая машина для литья алюминия “два в одном”
Многопозиционная роторная автоматическая машина для литья алюминия “два в одном” -
 Сервоприводной портальный манипулятор
Сервоприводной портальный манипулятор -
 Машина для измерения высоты для статора и ротора
Машина для измерения высоты для статора и ротора
Связанный поиск
Связанный поиск- Однопозиционная высокоэффективная роторная машина для литья алюминия
- Плавильная печь 6
- Четырёхстоечная многопозиционная тяжёлая роторная машина для литья алюминия
- Многопозиционная роторная автоматическая машина для литья алюминия два в одном
- Однопозиционная малая роторная машина для литья алюминия
- Полностью автоматическая прессовая монтажная машина для статора
- Четырёхстоечная многопозиционная лёгкая роторная машина для литья алюминия
- Лёгкая прессовая монтажная машина
- Плавильная печь 8
- Многопозиционная аргоновая сварочная машина для статора и ротора



