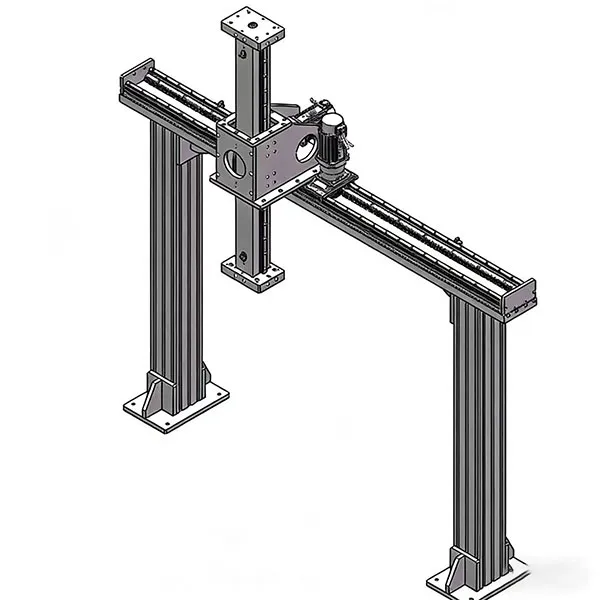
Сервоприводной портальный манипулятор для загрузки/разгрузки
Когда слышишь ?сервоприводной портальный манипулятор?, многие сразу представляют себе просто мостовой кран с парой двигателей. Вот тут и кроется первый подводный камень — ключевое отличие не в самой портальной схеме, а в интеграции полноценного сервопривода по всем осям, включая вертикальную, и в его ?интеллекте? для точного позиционирования груза, а не просто его перемещения из точки А в Б. Часто заказчики экономят на вертикальной оси, ставя обычный гидроцилиндр, а потом удивляются, почему деталь при установке в пресс-форму ?гуляет? на полмиллиметра и требует ручной доводки.
Конструкция, которая работает, а не просто выглядит на бумаге
Основная ошибка при проектировании — недооценка жесткости всей конструкции в динамике. Можно взять мощные серводвигатели и редукторы, но если портал из обычной стали и без правильного расчета на кручение, при разгоне с грузом будет ощутимая раскачка. Мы в свое время на одном из первых проектов столкнулись с этим: манипулятор точно подъезжал по координатам, но захват с ротором электродвигателя качался еще секунды две после остановки. Пришлось переделывать балку, добавляя внутренние ребра жесткости и переходя на более подходящий сортамент. Это не по учебнику, это уже опыт, который дорого стоит.
Второй нюанс — выбор типа направляющих. Часто ставят рельсы и каретки, это надежно. Но для средних нагрузок и в условиях, где возможна пыль от литья или сварки, иногда практичнее оказываются полированные валы с бронзовыми втулками в защитных кожухах. Меньше забивается, проще обслужить в цеху. В продукции, например, ООО Тайчжоу Ичан Электромеханическое Оборудование можно увидеть разные варианты исполнения, что говорит о гибком подходе под задачи клиента, а не о шаблонном решении.
И третий момент — система безопасности. Здесь нельзя ограничиваться концевиками. Обязательны датчики крутящего момента на сервоприводах для обнаружения коллизий (столкновения) и энкодеры с резервированием. Помню случай на разгрузке литых заготовок: оператор случайно оставил на столе инструмент. Манипулятор, двигаясь по программе, наткнулся на него, датчик момента сработал мгновенно, и система остановилась, избежав поломки захвата и дорогостоящего простоя. Это та самая ?мелочь?, которая отличает готовое промышленное решение от опытного образца.
Сервопривод — сердце системы, а не просто мотор
Тут часто ищут компромисс между ценой и точностью. Дешевый сервопривод с низкой разрешающей способностью энкодера может давать накопленную ошибку позиционирования, особенно при многоцикловой работе. Для операции, скажем, загрузки ротора в сварочный автомат, это критично. Мы обычно рекомендуем и сами используем приводы с абсолютными энкодерами, чтобы не было необходимости в референтном (домашнем) движении после каждого отключения питания. Экономия времени на цикле — существенная.
Настройка ПИД-регуляторов — это отдельная история. Готовых рецептов нет. Для горизонтального движения с большой массой и для точного вертикального позиционирования параметры будут разными. Иногда полезно иметь профили скорости с S-образным разгоном и торможением, чтобы минимизировать раскачку груза на тросе или жестком захвате. В документации к сервоприводному портальному манипулятору от Тайчжоу Ичан видел, что они поставляют оборудование с уже адаптированными профилями под типовые задачи, например, для работы с пресс-формами для статоров и роторов. Это разумно, так как избавляет инженеров на месте от долгой и рискованной самостоятельной настройки.
Еще один практический совет — обращать внимание на перегрузочную способность привода. В спецификациях часто пишут номинальный момент. Но в реальности, при захвате детали может возникнуть небольшой перекос, или деталь немного заклинит. Привод должен выдерживать кратковременную перегрузку в 2-3 раза без отключения по ошибке, а плавно попытаться завершить цикл или перейти в аварийный режим. Иначе будут ложные остановки на ровном месте.
Захватные устройства: универсальность vs. специализация
Самый сложный вопрос для технолога. Делать ли быстросъемный универсальный захват под несколько типоразмеров деталей или жестко заточенный под одну операцию? Первый путь ведет к усложнению механики (пневмоцилиндры, поворотные механизмы) и снижению надежности. Второй — к потере гибкости линии.
На мой взгляд, для задач, где номенклатура меняется редко, как в серийном производстве электродвигателей, лучше специализация. Например, для загрузки литых роторов в автоматические сварочные машины оптимален жесткий центрирующий захват с механическим приводом от сервомотора. Он обеспечивает повторяемость позиционирования в пределах 0.1 мм, что для последующей сварки критически важно. Универсальный же захват с регулируемыми лапками эту точность в условиях вибрации цеха вряд ли будет держать долго.
Материал захватов — тоже неочевидный момент. Для алюминиевых деталей нельзя использовать сталь той же твердости, будут задиры. Либо мягкая сталь с наплавлением, либо покрытие, либо капролон. На одном из проектов пришлось переделывать губки захвата для алюминиевых роторов именно из-за этого: через пару тысяч циклов появились риски на посадочных поверхностях детали.
Интеграция в линию: где скрываются главные проблемы
Казалось бы, манипулятор отлажен, захват работает. Но когда его встраивают между, допустим, ленточным конвейером на подаче и четырехколонным прессом на приемке, начинаются тонкости. Самая частая — рассинхронизация циклов. Конвейер должен точно остановиться, когда деталь в зоне захвата. Датчики на конвейере и манипуляторе должны говорить на одном языке с общим контроллером (ПЛК). Лучше, когда один производитель, как ООО Тайчжоу Ичан, отвечает за комплекс: сервоприводной портальный манипулятор, конвейер и пресс. Тогда программная интеграция уже предусмотрена, протоколы обмена данными стандартизированы.
Еще одна точка сбоя — система технического зрения, если она используется для коррекции положения детали. Ее калибровка относительно системы координат манипулятора — это кропотливый процесс. И если основание манипулятора или камера вибрируют (от работы того же пресса), точность ?уползает?. Приходится делать жесткие независимые кронштейны под камеры и закладывать циклы периодической самокалибровки в программу.
Электропитание и помехи. Серводвигатели — источник серьезных помех в сети. Если рядом чувствительная измерительная аппаратура, например, детекторы или установки для испытаний статоров под высоким давлением, нужно сразу закладывать раздельные линии питания, хорошее заземление и, возможно, сетевые фильтры. Иначе будут ложные срабатывания датчиков в соседнем оборудовании.
Экономика и надежность: что важнее в долгосрочной перспективе
При выборе такого оборудования всегда стоит вопрос: переплатить за известный бренд комплектующих или собрать из доступных аналогов? Практика показывает, что для ответственных участков, где простой линии стоит огромных денег, экономия на сервоприводах или подшипниках качения выходит боком. Но это не значит, что нужно брать самое дорогое. Нужно искать оптимальное соотношение.
Например, для самого портала можно использовать надежные, но не самые раскрученные марки редукторов и направляющих. А вот контроллер движения и сервоусилители лучше брать от проверенного производителя с хорошей технической поддержкой. Потому что отладка и поиск ошибок в ?кустарно? собранной системе управления могут занять недели.
В этом плане интересен подход компаний, которые, как Тайчжоу Ичан, предлагают готовые комплексные решения. Они, с одной стороны, используют проверенную элементную базу, а с другой — за счет собственной сборки и отладки на заводе могут предложить более выгодную цену, чем если бы заказчик покупал все компоненты по отдельности и самостоятельно занимался интеграцией. Их сервоприводной разливочный автомат и манипулятор часто проектируются для совместной работы, что снижает риски на этапе ввода в эксплуатацию.
В итоге, успех внедрения сервоприводного портального манипулятора для загрузки/разгрузки упирается не в звездные характеристики из каталога, а в детали: в жесткости рамы, в тонкой настройке сервопривода под конкретную массу, в правильно рассчитанном и изготовленном захвате, и, что не менее важно, в грамотной интеграции в существующий или проектируемый технологический процесс. Это всегда работа на стыке механики, электроники и практического опыта. И когда все эти элементы сходятся, оборудование работает годами, становясь не проблемой, а незаметным и надежным помощником в цеху.
Соответствующая продукция
Соответствующая продукция



Самые продаваемые продукты
Самые продаваемые продукты-
 Статорная зажимная машина
Статорная зажимная машина -
 Испытательный стенд для роторов
Испытательный стенд для роторов -
 Сервоприводной портальный манипулятор
Сервоприводной портальный манипулятор -
 Многопозиционная роторная автоматическая машина для литья алюминия “два в одном”
Многопозиционная роторная автоматическая машина для литья алюминия “два в одном” -
 Пресс-форма для статора и ротора
Пресс-форма для статора и ротора -
 Однопозиционная автоматическая роторная машина для литья алюминия
Однопозиционная автоматическая роторная машина для литья алюминия -
 Машина для измерения высоты для статора и ротора
Машина для измерения высоты для статора и ротора -
 Четырехстоечный пресс
Четырехстоечный пресс -
 Промышленный масляный охладитель
Промышленный масляный охладитель -
 Многопозиционная лазерная сварочная машина для статора и ротора
Многопозиционная лазерная сварочная машина для статора и ротора -
 Конвейер
Конвейер -
 Плавильная печь
Плавильная печь
Связанный поиск
Связанный поиск- Многопозиционная высокоскоростная сварочная машина для статора и ротора
- Энергосберегающая роторная машина для литья алюминия
- Многопозиционная сварочная машина для статора и ротора
- Многопозиционная высокоэффективная сварочная машина для статора и ротора
- Высокоточная гидравлическая машина для горячей штамповки вала
- Разливочная машина
- Открытая многопозиционная энергосберегающая роторная машина для литья алюминия
- Сервоприводной высокоэффективный портальный манипулятор
- Малый пресс
- Многопозиционная энергосберегающая роторная машина для литья алюминия два в одном



